机器能否拥有意识?
2016/3/12 哲学园
机器能否拥有意识――机器意识研究及其意向性分析周昌乐 刘江伟一、机器意识研究策略分析
在过去十年,人们再次高度关注意识问题,并有众多的哲学家、心理学家和神经科学家在此领域开展工作。人们也开始使用计算模型来检验意识理论,并已有一些推测认为这最终可能导致实际拥有意识这种奇妙状态的、更为智能的机器。这类研究逐渐被称为“机器意识”的研究。早期有关机器意识的研究比较初步,① 研究工作较少得到学术界的认同,甚至前些年提到“机器意识”还有不合时宜的顾虑。但随着最近十年的发展,机器意识现在已经成为广泛关注的合法研究领域。
从研究策略来看,机器意识的研究主要分为算法构造策略(A)与仿脑构造策略(B)两种途径。所谓算法构造策略,就是不考虑人类脑机制的借鉴,纯粹采用机器算法策略来进行机器意识的研究(Algorithm);所谓仿脑构造策略,就是充分借鉴人脑意识的发生机制(Brain-Inspiration),并利用一切可利用的生物物理机制来进行机器意识的研究。在具体的实现方法上,仿脑构造策略可以分为如下三种具体方法。
(1)规则计算方法(R)。规则计算方法与认知科学中的符号系统范式相对应,其实质性观点简单说就是:心智内部具有对世界的“表征”,并可以根据“规则”来操作或操纵这些表征。这一范式的基本方法是探究智能或认知是怎样经由理性符号表征的操作而成为可能的,并认为这就是认知的本质。②
(2)人工神经网络的方法(N)。人工神经网络是由具有各种相互联系的神经单元组成的集合,每个单元具有极为简化的人脑神经元的特性。人工神经网络方法与认知科学中的联结主义范式相对应,其核心概念是“并行分布处理”,即认知或智能是从大量单一处理单元的相互作用中产生。③
(3)量子计算方法(Q)。机器意识实现的另一种途径是采用量子物理学方法来进行意识的建模研究。在这方面,Amoveso等人首先开启了深入研究的先河。④ 到21世纪,Woolf给出了用于视觉意识的量子方法。⑤ 作为这种机器意识途径的进一步发展,Gao提出了意识的一种量子理论,研究了量子塌缩与意识之间的关系问题,假定量子塌缩是一种客观的动态过程,可以描述意识的产生过程。⑥
在上述三种方法中,值得注意的是量子计算方法。量子理论描述意识产生机制的有效性并不是说物质的量子活动可以直接产生意识,而是强调意识产生机制与量子机制具有跨越尺度的自相似性。正是因为这样,近年来意识的量子模型有快速发展的动向,如Mureika从类量子计算的角度提出的一种意识涌现的物理理论⑦、Savtchenko给出的一种同步振荡神经网络⑧ 以及Schroeder提出的奇妙统一意识能够用量子力学的形式化代数来描述观点⑨ 等,都为意识的量子计算建模提供了新的基础,值得我们特别关注。
二、机器意识现状的分类综述
参照Gamez在综述机器意识的研究进展中所提出的机器意识分类体系,⑩ 按照研究目标与内容的不同,可将目前机器意识的研究划分为如下五个不同的类别,并作为我们后面讨论机器意识能否达成最终目标的分析依据。
(1)具有意识表现的机器感知模型(MC-P)
早期的机器意识研究主要是在机器感知处理中引入意识机制,因此是属于MC-P类型的机器意识研究。比如Aleksander的有关视觉觉知模型(11) 以及Taylor提出的三段阶意识的神经网络模型,(12) 都是这方面的研究工作。
Aleksander提出的一个视觉觉知人工神经系统,主要是通过图像学习处理将所感知的虚拟世界完全描述出来,而系统中的意识则定义为一种具有稳定性和可覆盖性的状态,神经系统被赋予了表现颜色及形状的能力并予以“意识性”编码形成图像。当然系统也体现出诸如重构能力、短长期记忆、注意力、对颜色及形体的辨识反应、物体命名以及范畴分类方面的能力。
不过,总体上讲,由于此类研究工作的特点是帮助机器更加有效地进行感知,采取的策略往往是某种更高阶的监督或注意机制,因此,还谈不上真正意义上的伴随性意识的实现,可以看做是有监控的关注性元感知计算机制的实现。
(2)具有认知特性及其行为表现的机器意识(MC-C)
迄今为止,已经研制了许多介于意识与认知能力之间,诸如语言、想象、情感等的基于神经联结主义方法实现的系统。
就语言而言,早在1989年,Angel就曾经给出了一个基于语言与主体的意识机器的体系结构。(13) 在体现意识的情感表现研究中,Ogiso使用人工意识流实现了一种机器人情感表达的方法,(14) Igarashi则开发了情感意识机器人并给出了一些模仿行为的实现。(15) 在意识想象方面,Lesser给出了一种机器意识的联想神经网络,(16) 而Clowes基于涉身的概念,对机器意识与想象的关系进行了讨论。(17)
应该指出,MC-C类型的机器意识研究是一种强势模式,从简单的算法程序到基于模拟神经元的系统等都有研究。这种类型的实现方法比较广泛,所强调的是有意识的认知能力,包括语言、想象、情感等内部模型以及适应环境的外部表现行为等。因此,通常行为测验是检验此类系统是否具有意识的主要途径。
(3)具有人类意识相对应机制的意识机器(MC-A)
对意识产生机制及其机器模拟实现的研究,对于机器意识研究而言,无疑是最具有吸引力的研究方面,因此也吸引了众多研究人员开展有关这方面的研究工作。这类研究常常从理论到模型来检验意识认知理论,成为机器意识最具特色的研究领域之一。
MC-A机器意识研究的主要成果有Baars的全局工作空间(18)、crick的神经同步振荡理论(19)、Tononi的高级信息整合系统,(20) 以及基于这些理论开展的大量具体机器实现方面的研究。
此类研究的一个关键前提就是首先必须对人类的意识产生机制有全面的了解,才能基于这样的了解基础,来实现机器的意识机制。因此,很多这类研究通常采用仿脑构造策略来进行。(21)
(4)拥有自我感觉的机器意识(MC-S)
有关机器自我意识的研究,是机器意识实现研究中的一个重要方面。1998年,Mulhauser首先对意识与自我意识如何能够进行机器实现的问题进行讨论,(22) 接着Kawamura采用多主体认知结构体系开发了一个具有自我感觉的机器人,(23) Suzuki则开发了能够区别自我与他人的意识机器人并进行了行为模仿实验,(24) Luaces曾使用模块神经网络来实现人工智能体的自我意识。(25)
比较系统的研究是Samsonovich所开展的工作,主要是基于图式建立了一个自我意识模型(26) 并进行系统实现。在该机器系统中,其认知体系结构是围绕着对应于系统自我“意识”的图式展开的,据称这些图式(schemas)能够处理的数据项不但包括语义知识、行动要素,而且还包括感觉质(qualia)。
当然,对于机器是否拥有自我意识的客观检验是十分困难的,关键在于机器的“自我”的指称可以有完全不同的解释。
(5)拥有奇妙意识体验状态的机器(MC-Q)
由于前四种类型的机器意识研究都是针对与意识相关联的现象进行建模,并没有声称具有真正的奇妙意识体验状态,因而这些方法都是相对无争议的。但机器意识第五个方面的研究却涉及更多的哲学问题,因为其涉及拥有真正奇妙意识体验的机器――这种意义上的机器已经不仅仅是意识研究的工具,而是实际具有意识体验的机器。
Aleksander领导的课题组长期开展机器意识的研究工作,主要给出了有关意识的公理系统及其神经表征建模实现,(27) 比较强调采用虚拟计算机器来建模意识,(28) 包括功能主义(Functionalism)与奇妙体验状态学(Phenomenology)。功能主义取向导致基于传统程序设计算法的方法,奇妙体验状态学取向则导致神经网络分析方法。
三、对机器意识研究的哲学评论
由于涉及心灵的一些本质问题,机器意识研究一开始就引起了哲学上的广泛关注。有的专门讨论机器意识研究的哲学基础,也有讨论机器意识所会面临的困难,包括像心灵(mind)、感受质(qualia)和自我觉知(self-awareness)这些回避不了的、显而易见的困难问题,以及一些与意识相关的认知加工,如感知、想象、动机和内部言语等方面的技术挑战。
首先,在传统人工智能研究的哲学讨论中,通常按照Searle标准分为强与弱两类:弱人工智能的观点主要是把机器看做是研究心智的有力工具,而强人工智能则认为机器不仅仅是研究心智的一个工具,而且通过巧妙编程的机器能够具备心智的能力。根据Searle的论述,(29) 强人工智能试图创建某种人类意义上心智的东西,而弱人工智能则是使用人类可理解的相同符号对心智进行建模处理。这种区分类似于Franklin对奇妙意识与功能意识所做的区分,(30) 也与意识的难易问题(该问题我们将在后文中介绍)区分相关联。这样,实际上建立了心智的外部表现与真实心智之间的对立,由此可以在MC-Q与强AI之间建立对应关系,而把其余四类研究当做弱AI的研究的延续看待。
针对机器意识而言,在传统对人工智能研究的批评中,中文之屋的思想实验主要是用来批评MC-Q的,(31) 也就是说即使机器人外观行为像人类(处理汉字)一样成功,也无法说明这些机器具有人类一样的奇妙意识状态(甚至没有任何意义的理解或意向性)。在机器意识的研究者那里,对这一批评意见的回应是基于符号所指的观念:如果中文之屋的文字与非符号表示相关联,比如图像或声音,那么系统可以理解符号的意义并拥有指向该意义的内部状态。也就是说,开发具有指称意向对象的机器是可能的。
人工通用智能(AGI)秉承早期人工智能的初衷,围绕着通用智能的实现问题,试图再现人类的所有智能行为,(32) 因此往往与MC-C的研究有着密切关联。不过,有可能按照AGI对智能的定义,一些与意识有关的认知特性与行为可能被排除在智能行为之外,也有可能AGI包括所有MC-C关注的内容。AGI与MC-C的差别主要是:MC-C主要关注人类意识的认知特性与行为表现,而AGI关心的是通用智能特性与行为表现。AGI能否实现完全是一个开放问题,一些AGI系统也开展有关意识机制方面的研究工作(MC-A)。当然,不能排除AGI系统具有奇妙意识体验状态的可能(MC-Q)。因此,AGI的研究工作及其哲学取向与机器意识研究最为接近。
其次,从脑科学研究的需要出发,认知神经科学也开展了一些神经建模的研究,包括与意识有关的神经模型;认知科学特别是神经联结主义也同样建立有关跟。MC-C相关的认知计算模型,当然这些研究的出发点是为了揭示人类意识的运行规律,大多数并不关心机器意识的实现问题。倒是往往在意识的难易问题上,对机器意识的实现问题给出了颇多的启发。(33)
从理论上讲,意识的难问题确实并不能完全摧毁MC-Q工作的可能性,因为即使意识如其所说是一个难问题,还是有许多理由可以说明MC-Q研究是具有科学研究意义的。其一,探询机器的奇妙意识以及建立模型能够增进我们对人类意识的理解,从而使我们更加接近难问题的解决。其二,到目前为止,机器是否具有意识仍然是一个不确定性的问题,即使我们不能确切地说出这是否就是对意识难问题的解决,起码可以迫使我们承认机器拥有意识的可能性不能被完全排除。其三,即使在没有理解奇妙意识成因的情况下,创建允许意识在一个系统中涌现的条件是可能的。其四,即使我们放弃在机器中所开展的类似研究,将来采用芯片来替换部分脑的研究也会迫使我们处理人类中的MC-Q问题。
再次,我们来讨论涉及对机器意识研究争议最大的奇妙意识体验状态人工合成奇妙体验状态学。人工合成奇妙体验状态学(Synthetic phenomenology)是机器意识工作涌现出的一个全新的研究领域,这一术语是Jordan于1998年提出的,专指奇妙状态的人工合成。(34) 在机器意识研究学会内部,该术语更多地用来确指人工系统是否具有意识状态的能力以及当意识状态出现时对其奇妙状态的描述,(35) 并成为意识能力的一种标准。(36) 那么机器能够拥有这种奇妙的意识状态吗?Kiverstein以“机器人能够具有自己的主观观点吗”为标题,对这一问题进行了比较清晰的分析。(37) 他指出,怀疑机器意识的可能性主要包括两个方面的论点:一方面,认为我们的神经生物系统是特有的,而我们的神经生物系统唯有共有的就是主观体验;另一方面,认为机器仅仅是一个蛇神(Zombie)而已,除了机器还是机器,不可能具有任何主观体验的东西。这也是代表目前大多数批评意见的观点。
当然,面对哲学界的这些批评意见,机器意识的研究可以采取弱AI的观点,也即把奇妙体验意识从心智概念中分离出来,将机器看做是没有MC-Q意义上意识的心智,这样就完全可能建立一个没有MC-Q意义上意识的强AI机器,从而回避哲学界的批评。
四、机器意识与唯识五蕴
早在机器意识研究起步阶段,我们在《无心的机器》一书观点的基础上,(38) 就对机器意识实现可能性问题提出过一些哲学上的反思,(39) 建议采用“自然机制+算法”的研究途径来开展机器意识的研究工作。以下将对“意识”的本质与构成进行分析,以便根据不同的实现目标与内容,来给出关于机器能否拥有意识能力的更为详细的分析结果。
图1给出了意识运行机制的一种框架示意图,物质运动变化创生万物,生物所基于的生理活动支持着神经活动,神经活动涌现意识,意识感受生理表现并指导意向性活动的实现,从而反观认知万物之理。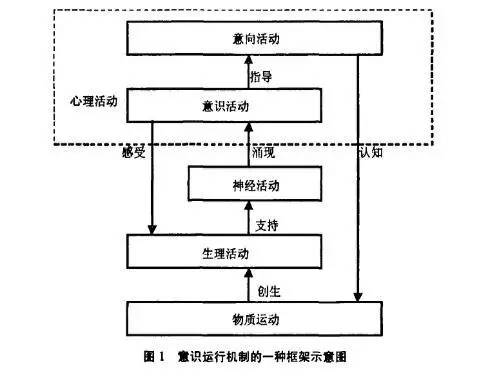
这里必须注意两个要点:其一,不是所有的神经活动都是有意识的,也不是所有的意识活动是有意向性的;其二,必须区分感受与感知之间的根本差别,感受是无意向性意识活动,是对内在身体与情感的状态体验(往往与感受质有密切关系),感知是认知的初级阶段,是对外在事物有意向性的认识活动。比如,眼睛看事物是感知,看久了眼睛酸痛是感受,不能混为一谈。眼睛看事物,事物就是意向对象,所以感知是意向性活动;看久了眼睛酸痛是一种状态体验,没有意向对象,因此感受尽管有意识体验,但不是意向性活动。
现在,如果我们把心理活动界定为一切有意识的神经活动,那么就可以将我们的讨论与佛教唯识学所研究的心识问题相互关联起来,也即我们可以采用五蕴八识的唯识体系对意识活动的构成进行详尽的分析。
佛教唯识学中的五蕴包括色蕴、受蕴、想蕴、行蕴、识蕴五种心理范畴,是横向分析心识的一种学说。八识包括眼识、鼻识、耳识、舌识、身识、意识、末那识、阿赖耶识,是纵向看待心识的一种学说。两种学说通过心法学说(包括色法、心所法、不相应法、心法等)的联络,就形成了完整的唯识体系。在这个体系中,如果不考虑宗教本体哲学上的需要所设立的末那与阿赖耶互相为根的两识,那么作为心理学说而言,唯识学的一切研究都是围绕着意识展开的。
第一,前五识归为色蕴,对应的心法称为色法,相当于当代心理学中的感知,其意识的作用称为五俱意识(所谓“俱”,就是伴随)。如果这种感知是真实外境的感知,则其伴随性意识称为同缘意识;如果是有错觉的感知,则称不同缘意识;如果这种感知活动产生后像效应,则称为五后意识(属于不相应法)。一般而言,色蕴对应的心理活动都是有意向对象的,因此属于意向心理活动。
第二,受蕴是一种心所法(具体的心理能力),主要是指身体与情感状态的感受。注意这里要区分身识中的身体状态感受与色蕴是完全不同的心理能力,身识相当于触觉,是一种感知能力;身体状态的感受不是感知能力,而是感受身体疼痛、暖冷等的体验能力。受蕴的心理活动,虽然具有意识,但不具有意向对象,因此不属于意向性心理活动。
第三,想蕴是另一种心所法,用现代认知科学的话讲,就是狭义的思维能力,如思考、记忆、想象等。想蕴属于认知的高级阶段,显然是属于意向性心理活动。
第四,行蕴也是一种心所法,主要指一切造作之心法,用现代认知科学的话讲,就是动机、欲望、意愿、行为等。唯识学中的“行”,与“业”的概念相互关联,一般分为三种,即身业(行动)、语业(说话)和意业(思想),但都强调有意作为的方面,因此行蕴也属于意向性心理活动。
第五,识蕴是整体统一的心法,更加强调的是后两识(第七末那识、第八阿赖耶识)的心法,现代西方的认知科学尚无对应的概念。识蕴主要强调的是返观能力,即对根本心识的悟解能力。
总之,色蕴是色法(感知能力),受蕴、想蕴、行蕴都是心所法(具体的心理能力),它们本身就是具有意识的心理活动(统归于心法)。其中色法的意识作用是伴随性的五俱意识,其他三蕴的意识作用与伴随性的意识则又有不同,称为独散意识(受蕴、想蕴、行蕴所涉及的意识,是一种周遍性意识活动)。当然,如果所有意识作用出现在梦中,唯识学中则另外称之为梦中意识(做梦时的意识活动,属于不相应法)。在唯识学的五蕴学说中,识蕴比较复杂,是唯识理论特别单列的一种根本心法,除了强调自我意识的末那识“我执”外,更加强调达到定中意识的阿赖耶识“解脱”,属于去意向性心理活动。
通过上述分析,我们发现在人们的心理活动中,意识是非常复杂的一种心理现象,其起作用的方式也是多样性的。对于目前的机器意识研究而言,实际上我们涉及的只有独散意识与五俱同缘意识。比如MC-Q涉及受蕴性独散意识,MC-C涉及行蕴性独散意识,MC-P涉及伴随性意识、MC-S涉及识蕴中的自我意识,MC-A涉及的是心法的意识活动本身的机制问题。其他像不相应法的梦中意识、五后意识、定中意识、五俱不同缘意识等都还没有涉及。
显然,对于机器而言,真正困难的意识实现问题则是受蕴性独散意识(体验性意识)与识蕴性意识两个方面。一个涉及无意向心理活动的表征问题,一个涉及去意向性心理活动的表征问题,都是目前计算理论与方法无法解决的问题。反过来讲,机器最有可能实现的意识能力部分应当是那些具有意向性的意识能力(色蕴、想蕴与行蕴),即唯识学心法中的色法与若干心所法。
实际上,由于意向性正是构建非体验性智能的前提条件,(40) 并可以通过Freeman所提出的一种意图(指向目标的)动力学模型来实现,(41) 因此机器意识的研究应该朝向意向性心智能力实现的目标开展研究。因为,非常明显的是,意向性意识活动一定伴随有意向对象,于是就可以对此进行计算表证,并完成其相关的计算任务。当然,考虑到意向对象的涌现性,采用的实现方法依然是我们建议的“自然机制+算法”的方法。(42)
当前,开展机器意识的研究工作应该集中在前三类研究中,并以实现意向性心理能力为根本目标,只有这样才能够找到机器意识的真正出路。
五、结论
总之,在对不同机器意识研究的归类分析基础上,通过援引唯识学的意识分析学说体系对意识能力进行分解分析,我们发现,把目前有关机器意识的研究分为面向感知意识实现的(MC-P)、面向具体特性意识实现的(MC-C)、面向机制意识实现的(MC-A)、面向自我意识实现的(MC-S)以及面向感受意识实现的(MC-Q)等五个类别,就可以同唯识学中意识的五蕴学说相对比,从而更加清楚地认识其中的本质问题所在。对于机器意识研究与开发,应该搁置有争论的主观体验方面(身心感受)的实现研究,围绕意向性意识能力(环境感知、认知推理、语言交流、想象思维、情感发生、行为控制),采用仿脑与量子计算思想相结合的策略,开发具有一定意向能力的机器人,并应用到社会服务领域。
相关阅读,直接点击以下标题:
人工智能达到奇点 - 最强论证文 三部曲
人工智能能否超越人类智能
未来人工智能中的显学:道德哲学
具身人工智能与现象学
弗协调逻辑与人工智能
【注释】 ①④周昌乐:《意识计算模型的研究综述》,《中国人工智能进展》,北京:北京邮电大学出版社,2003年,第71-76页。 ②③熊哲宏:《认知科学导论》,武汉:华中师范大学出版社,2002年,第113、179页。 ⑤Woolf N.J.,Hameroff S.R.,A quantum approach to visual consciousness,Trends in Cognitive Sciences,2001,vol.5,no.11,pp.472-478. ⑥Gao S.,A quantum theory of consciousness,Minds and machines,2008,vo1.18,no.1,pp.39-52. ⑦Mureika J.R.,Implications for cognitive quantum computation and decoherence limits in the presence of large extra dimensions,International Journal of Theoretical Physics,2007,vol.46,no.1,pp.133-145. ⑧Savtchenko L.,Oscillatory Neuronal Networks,Neurophysiology,2008,vol.40,no.5-6,pp.417-421. ⑨Schroeder M.J.,Quantum Coherence without Quantum Mechanics Germany,Lecture Notes in Artificial Intelligence,2009,vol.5494,pp.97-112. ⑩Gamez D.,Progress in machine consciousness,Consciousness and Cognition,2008,vol.17,no.3,pp.887-910. (11)Aleksander I.etc,Towards Visual Awareness in a Neutral system,Brain-like computer and Intelligent Information system,by Shun-ichi Amari,Nikala Kasabov(eds.) Springer-verlag,Singapore,1998. (12)Taylor J.G.,Towards the networks of brain from brain imaging to consciousness,Neutral Network,1999,12,pp.943-961. (13)Angel L.,How to build a conscious machine,Westview Press,Boulder,San Francisco & London.1989. (14)Ogiso A.,Kurokawa S.,Yamanaka M.,et al.,Expression of emotion in robots using a flow of artificial consciousness,IEEE International Symposium on Computational Intelligence in Robotics and Automation,2005,JUN 09-30,Espoo,FINLAND,pp.421-426. (15)Igarashi R.,Suzuki T.,Shirakura Y.,et al.,Realization of an emotional conscious robot and imitation behavior,13th IASTED International Conference on Robotics and Applications/IASTED International Conference on Telematics,AUG 29-31,Julius Maximilians Univ Wurzburg,Wurzburg,GERMANY,2007,pp.135-140. (16)Lesser E.,Schaeps T.,Haikonen POA,et al.,ASSOCIATIVE NEURAL NETWORKS FOR MACHINE CONSCIOUSNESS:IMPROVING EXISTING AI TECHNOLOGIES,2008,pp.11-15. (17)Clowes R.,Torrance S.,Chrisley R.,Machine consciousness:Embodiment and imagination,JOURNAL OF CONSCIOUS- NESS STUDIES,2007,vol.14,no.7,pp.7-14. (18)Baars B.,A cognitive theory of consciousness,Cambridge University Press,Cambridge.1988. (19)Crick F.,The astonishing hypothesis,Simon & Schuster,London.1994. (20)Tononi G.,An information integration theory of consciousness,BMC Neuroscience,2004,p.42. (21)Andrew A.M.,Machine consciousness,ambisonics,KYBERNETES,2009,vol.38,no.3-4,pp.556-558 (22)Mulhauser G.,Mind out of matter,Kluwer Academic Publishers,Dordrecht,2002. (23)Kawamura K.,Dodd W.,Ratanaswasd P.,et al.,Development of a robot with a sense of self,IEEE International Symposium of Computational Intelligence in Robotics and Automation,2005,JUN 09-30,Espoo,FINLAND,pp.211-217. (24)Suzuki T.,Inaba K.,Takeno J.,Conscious robot that distinguishes between self and others and implements imitation behavior,Bari,ITALY,LECTURE NOTES IN ARTIFICIAL INTELLIGENCE,2005,vol.3533,pp.101-110. (25)Luaces M.M.,Rocha C.G.,Sierra J.P.,et al.,Tech Univ Sofia,Sofia,BULGARIA,Artificial Intelligence Series- WSEAS,2008,pp.113-118. (26)Samsonovich A.V.and K.A.DeJong,A general-purpose computational model of the conscious mind.In:M.Lovett,C.Schunn,C.Lebiere and P.Munro,Editors,Proceedings of the sixth international conference on cognitive modeling ICCM-Lawrence Erlbaum Associates,Mahwah,NJ,2004,pp.382-383. (27)Aleksander,I.,& Morton,H.,Why axiomatic models of being conscious? In R.Chrisley,R.Clowes,& S.Torrance (Eds.),Journal of consciousness studies special issue on machine conscio- usness,forthcoming in July.2007 a. (28)Aleksander I.,Modeling Consciousness in Virtual Computational Machines Functionalism and Phenomenology,SYN- THESIS PHILOSOPHICA,2007b,vol.22,no.2,pp.447-454. (29)Searle J.R.,Why I am not a property dualist,Journal of Consciousness Studies 9 (12),2002,pp.57-64. (30)Franklin S.,Deliberation and voluntary action in “conscious” software agents,Neural Network World 10,2000,pp.505-521. (31)Goertzel B.and Pennachin C.,Editors,Artificial general intelligence,Springer,Berlin. (32)(33)MacLennan B.J.,2005,Consciousness in robots:The hard problem and some less hard problems,14th IEEE Inter- national Workshop on Robot and Human Interactive Communication,AUG 13-15,Nashville,TN,2007,pp.434-439. (34)Jordan,J.S., Synthetic phenomenology? Perhaps,but not via information processing.Talk given at the Max Planck Institute for Psychological Research,Munich,Germany,1998. (35)Torrance,S.,Thin phenomenality and machine consciousness.In Chrisley,R.,Clowes,R.,& Torrance,S.(Eds.),Proceedings of the AISB 05 symposium on next generation approaches to machine consciousness,Hatfield,UK.2005. (36)Prinz J.J.,Level-headed mysterianism and artificial experience.In:O.Holland,Editor,Machine consciousness,Imprint Academic,Exeter.2003. (37)Kiverstein J.,Could a robot have a subjective point of view?,JOURNAL OF CONSCIOUSNESS STUDIES,2007,vol.14,no.7,pp.127-139. (38)周昌乐:《无心的机器》,长沙:湖南科学技术出版社,2000年。 (39)(42)周昌乐:《关于人工意识研究途径的哲学反思》,《科学技术的哲学反思》,北京:清华大学出版社,2004年,第247-264页。 (40)Wohlsehlager A.,Engbert K.,Haggard P.,Intentionality as a constituting condition for the own self-and other selves,CONSCIOUSNESS AND COGNITION,2003,vol.12,no.4,pp.708-716,DEC. (41)Freeman W.J.,Dynamic models for intention (goal-directedness) are required by truly intelligent robots,2nd International Symposium on Neural Networks,MAY 30-JUN 01,Chongqing,PEOPLES R CHINA,LECTURE NOTES IN COMPUTER SCIEN- CE,2005,vol.3496,pp.21-33.
个人投稿
学报刊物荐稿
zhexueyuan2013@163.com
编辑微信「iwish89」



http://www.duyihua.cn
返回 哲学园 返回首页 返回百拇医药